Charge Controller
The solar plane incorporates a charge controller that’s connected between the solar array and the plane’s small Lithium Polymer (LiPo) rechargeable battery.
The
purpose of having a battery in the plane is safety. It’s imperative that every
radio controlled model have a safe and reliable source of electrical power for
the radio control receiver and the servos that drive the rudder & elevator.
Without
this battery, a banked turn away from the sun’s rays might shadow the solar
cells, interrupting the solar array’s output. In this
situation, the unpowered receiver would result in complete loss of radio
control. The plane could easily enter a non-recoverable flight attitude and
crash.
Carrying
a small battery alleviates this possibility. In normal flight it is not used,
and the charge controller automatically maintains it at, or near full charge.
As an added benefit, the battery can be drawn upon to provide a bit of extra
motor power during the hand-launch of this large, heavy plane. Once flying, the
throttle is reduced to a solar-only power setting.
Theory of Operation
All of the plane’s electrical loads are connected to the LiPo battery. The solar array also connects to the battery through low-resistance electronic switches in the charge controller. This configuration provides the electronics with a safe, reliable source of power during flight.
The
charge controller continuously monitors the voltage of the 2-cell 3.3A-H LiPo
battery. If the battery is at 8.4 volts (or higher) it is at full charge, and
must not be charged further. During such moments the solar panel is
electronically disconnected from the plane’s battery and loads. Briefly, all of
the power for the motor, receiver, servos, and telemetry system is draw from
the battery. This causes the battery's voltage to ramp downward, and after a
moment the charge controller detects the reduced voltage, signaling that the
battery needs a bit of charging. The solar panel's output (up to 10 Amps) is
electronically connected to the battery and loads. The solar cells power the entire plane and surplus solar
current recharges the battery, causing its voltage to ramp upward toward the
full charge voltage of 8.4V. When this voltage is achieved, the controller
disconnects the array from the battery and the cycle repeats endlessly and
automatically.
Long
term, the battery remains at (or extremely close to) full charge, and the
flight is 100% solar powered. An analogy to this operation is the flywheel on
the back of a piston engine.
To
control the speed and stability of the switching, the controller incorporates
0.4V of hysteresis plus lowpass filtering in the control loop.
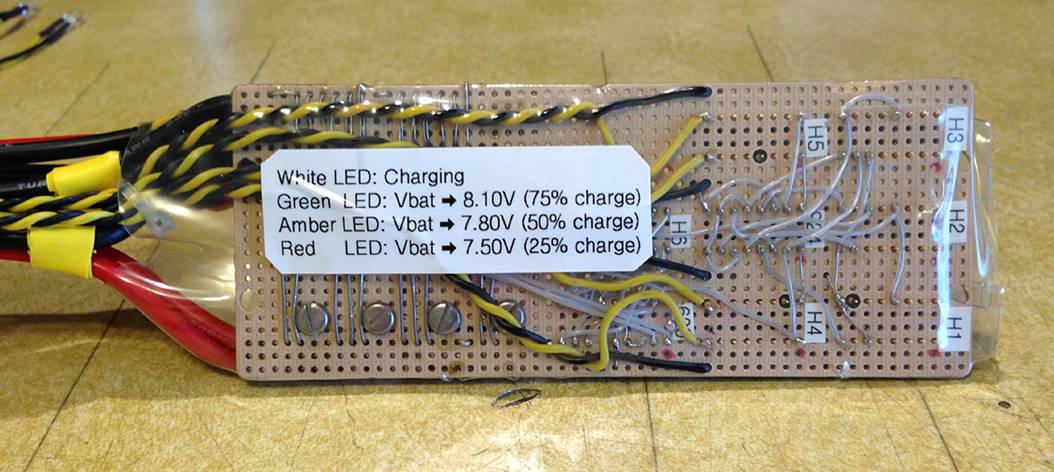
Additional voltage detectors drive high intensity LEDs mounted on the outside of the fuselage that are visible from the ground during flight. These LEDs indicate the battery's state of charge in increments of 25%, 50%, 75%, and 100%. An additional LED displays the instantaneous state of the controller's electronic switch.
I
included provision to include a second, identical 7.4V, 3.3A-H battery for
flying in conditions of low sun-angle (e.g. winter mornings) or on cloudy days.
Two batteries provide a flight time of over 30 minutes with no solar
contribution.
Charge
Controller Schematic (PDF)
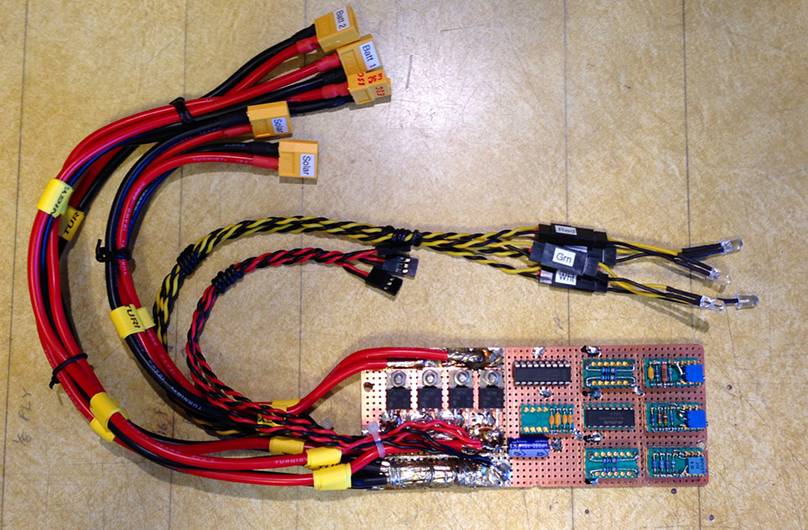
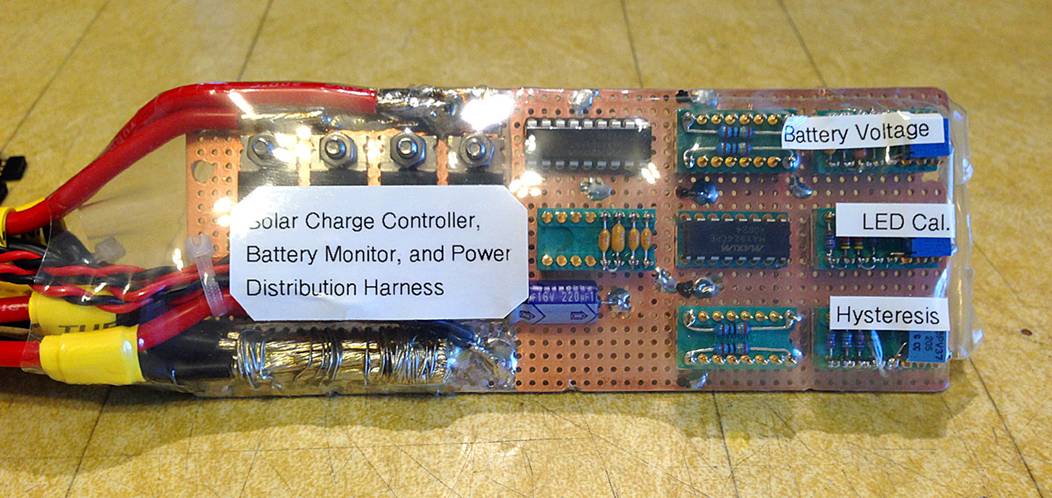
Charge Controller Photos

Back to the Solar Plane Main Page